 トップ
トップProcessingとPhybotsでARToolKitマーカーを検出する
Java/Processing で小型ロボットを簡単に動かせるツールキット Phybots は、オープンソースで公開されてしばらく経ちますが、正直なところ忙しくてあまり管理に手が回っておらず、すぐ使える配布ファイルもありませんでした。
#五十嵐 ERATOのポスターセッションでさまざまな方に興味を示していただけたので、ようやく意を決してProcessing ですぐ使えるライブラリの配布を始めました。
Phybots はいろいろ便利だという話
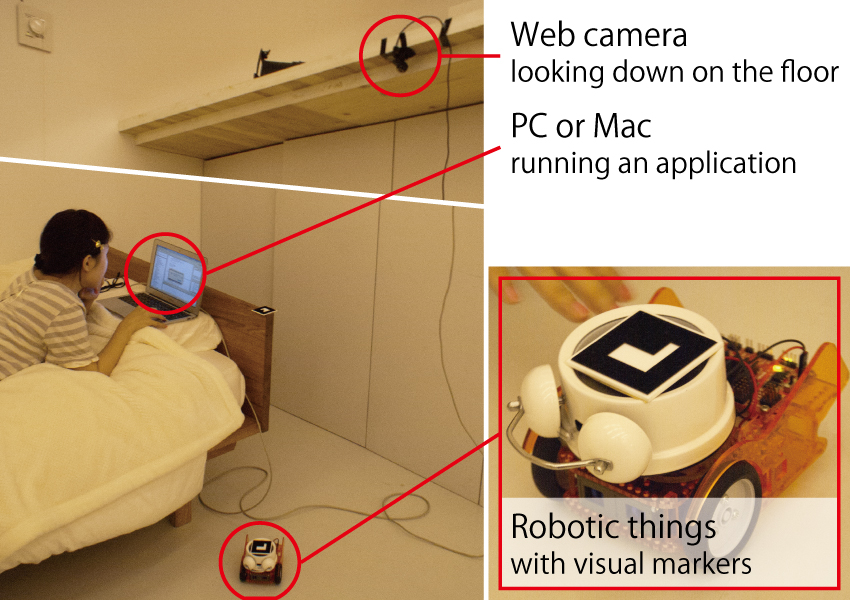
Phybots は、右上の写真のようなセットアップで使われることを想定したツールキットです。床や机の上を見下ろすカメラと、ARToolKit マーカーをつけた小型ロボットを、PC や Mac に接続して、ロボットを好きな場所に移動させたり、物を押させたりできます。作例は YouTube のプレイリストPhybots Applicationsに載っています。
ただし、僕はマーカーをつけていない単なる LEGO ベースのロボットに特定の動きをさせるプログラムを書くのに使っていますし、3DCG の重畳表示をしないのであれば、マーカーの位置を検出するのもかなり簡単です。Phybots は 2008 年の年末に開発が始まり、けっこうな年月をかけて API が作りこまれたライブラリなので、用意された機能のサブセットだけでもいろいろ便利なのです。
この記事では、Processing+Phybots の組み合わせで、カメラ画像からマーカーを検出して、その位置にテキストを表示するコードを紹介します。

Phybots のインストール
他の Processing 用ライブラリと同じように、PhybotsP5.zipを解凍してできる PhybotsP5 フォルダを libraries フォルダの中に移動すれば、ライブラリ本体のインストール完了です。
Processing を起動して、メニューの Sketch > Import Library...の中に PhybotsP5 があれば成功です。(Processing 2.0 の場合は、表記が Phybots for Processing に変わります。)
次に、Windows の場合だけ、Web カメラから綺麗な画質で画像を取ってくるためにDirectShow Java Wrapperをインストールする必要があります。リンク先からダウンロードした ZIP ファイルを解凍して、dsj.jar と dsj.dll を PhybotsP5/library/に移動します。
このとき、64bit 版の Windows で 64bit 版の Java(Processing)を使っている人は、x64 フォルダの中に入っている dsj.dll を使ってください。(分からない場合はとりあえずどちらでもいいので PhybotsP5/library/に移動してください。スケッチを実行したときに UnsatisfiedLinkError が出るので分かります。)
スケッチ
PhybotsP5/examples/MarkerDetection/MarkerDetection.pde を開いてみてください。以下のような内容のスケッチがあるはずです。
import com.phybots.*;
import com.phybots.service.*;
import com.phybots.utils.*;
import com.phybots.p5.*;
import jp.digitalmuseum.napkit.*;
Camera camera;
PhybotsImage img;
MarkerDetector md;
NapMarker marker;
void setup()
{
// カメラを起動する
camera = new Camera();
camera.start();
// カメラの画像をProcessingで見られるようにする
img = new PhybotsImage(camera);
// マーカー検出を始める
marker = new NapMarker(dataPath("4x4_45.patt"), 55);
md = new MarkerDetector();
md.setImageProvider(camera); // このカメラの画像から検出
md.addMarker(marker); // このマーカーを検出
md.start();
size(640, 480);
// ランタイムデバッグツールを表示する
Phybots.getInstance().showDebugFrame();
}
void draw()
{
image(img, 0, 0);
// 検出結果を取得する
NapDetectionResult result = md.getResult(marker);
if (result != null) {
ScreenPosition p = result.getPosition();
ScreenRectangle r = result.getSquare();
// 検出エリアを赤線で囲む
stroke(255, 0, 0);
for (int i = 0; i < 4; i ++) {
ScreenPosition a = r.get(i);
ScreenPosition b = r.get((i + 1) % 4);
line(a.getX(), a.getY(), b.getX(), b.getY());
}
// 検出結果をテキストで表示する
fill(255);
text("confidence: " + result.getConfidence(), p.getX(), p.getY());
}
}
コメントがあるので、あまり説明するところはないかもしれません。setup()では、カメラ(Camera)が画像を取ってきてマーカー検出器(MarkerDetector)に渡し、マーカー(NapMarker)を検出するようにセットアップしています。draw()では、マーカー検出器に検出結果を尋ね、もし検出されていたら、その位置にいろいろ描くようにしています。
おまじないチックなのは img = new PhybotsImage(camera) あたりでしょうか。これは、もともと Java 用のライブラリだった Phybots を Processing に接続するための部分で、camera を PImage として画面に直接貼り付けられるようにしています。ランタイムデバッグツールについては次で説明します。
プログラムの起動
まず MarkerDetection/data/4x4_45.pdf を印刷してください。自分のマーカーパターンを持っている場合は、スケッチの中の 4x4_45.patt をそのマーカーファイルの名前に書き換えてやればそれが検出されます。
「Run」ボタンをクリックすればスケッチがコンパイルされ、プログラムが起動するはずです。32bit 版、64bit 版、それぞれの Windows と Mac で動作確認が取れています。Windows で UnsatisfiedLinkError が出た場合は、DirectShow Java Wrapper の DLL の bit を確かめてください。その他、起動しない場合は@arcatdmzに聞いてください。
プログラムが起動したら、上の画面のように、ふつうの Processing のウィンドウのほかにもう一つウィンドウが開くはずです。これがランタイムデバッグツールで、Phybots の API の利用状況が分かるようになっています。「サービス」タブで Phybots > Marker Detector を選ぶと、マーカー検出のためのパラメタを調整できます。照明条件によってうまくマーカーが検出されない場合は、ここで二値化の閾値を調整してみてください。
以上、マーカー検出のやり方説明でした!お疲れさまでした。今後も折を見てさまざまなコード例を紹介していきたいと思います。